Exemples de systèmes en BO et en BF
Vitesse d’un véhicule.
Positionnement d’un robot.
Fonctionnement d’un lave-vaisselle.
Maintien de la station debout chez l’homme.
Identification d’un système
Vocabulaire et définitions.
Systèmes du 1er ordre.
Systèmes du 2nd ordre.
Analogie entre la TZ et la TL
Domaine d’utilisation : réponses temporelles des systèmes analogiques / numériques
Transmittance : T(p) /T (z)
Equation du système : équation différentielle / équation de récurrence.
Propriété principale utilisée : propriété de la dérivée / propriété du retard.
Passage de l’équation du système à la transmittance.
Transformée d’une impulsion.
Transformée d’un échelon.
Théorème de la valeur finale.
Théorème de la valeur initiale.
Stabilité du système.
Réponse fréquentielle.
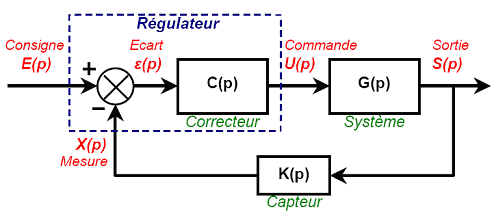
Principe des systèmes asservis
Systèmes en BO.
Systèmes asservis.
Expressions des transmittances.
Exercice correcteurs
Categories:2ème année