3ème PARTIE : Asservissement du système réel
On réalisera les régulations suivantes :
Réponse indicielle en BO :
Réponse indicielle avec correcteur proportionnel P. P = 1, P = 2, P = 3…
Réponse indicielle avec correcteur proportionnel PI. (P = 1, ti = 60 ms et ti = 100 ms)
Effet d’une perturbation sur la réponse indicielle en BF avec régulateur PI.
Réponse à une rampe avec correcteur proportionnel P et PI.
Réponse à des signaux e(t) Préenregistrés : « Trapèze » puis « parabole »
Comparer chaque réponse réelle avec chaque réponse simulée.
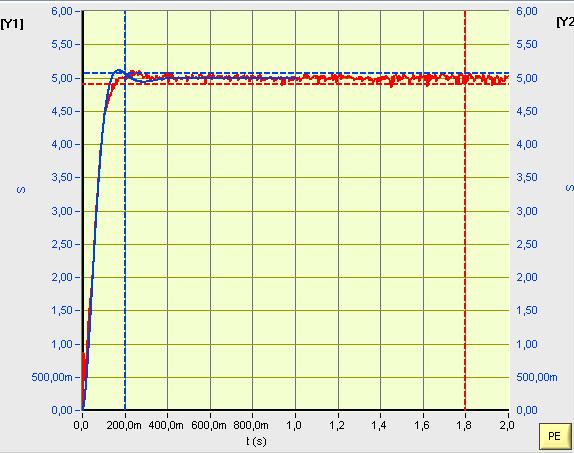 Réponse indicielle avec correcteur proportionnel PI. (P = 1, Ti = 60ms )
Réponse indicielle avec correcteur proportionnel PI. (P = 1, Ti = 60ms )
L’erreur statique est nulle : U s = 5V ==> n =31 tr/s. Le temps de réponse est légèrement différent de la simulation.
Categories:2ème année