Exercice 1 : Notions de base en courant continu : tension, potentiels, diviseurs de tension, résistance équivalente.
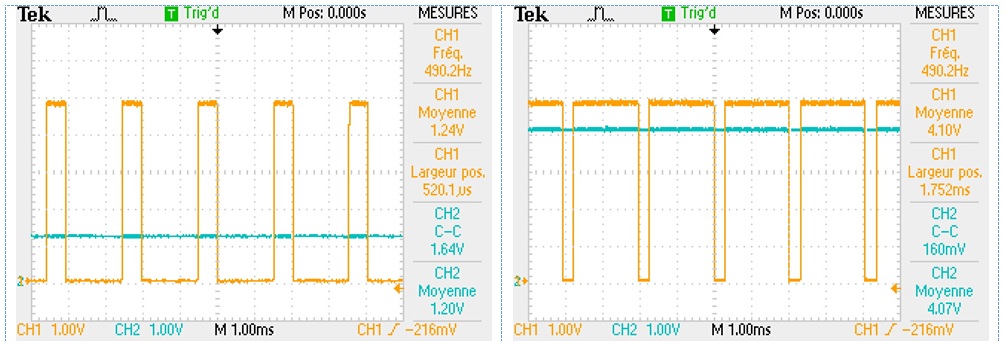
Exercice 2 : Caractéristiques temporelles d’un signal PWM : période, fréquence, amplitude , amplitude crête à crête, rapport cyclique, valeur moyenne, valeur efficace.
Exercice 3 : Mise en oeuvre d’un capteur d’éclairement : Caractéristiques du capteur, équation, valeur de l’éclairement mesuré.
Exercice 4 : Filtrage analogique du signal : spectre du signal d’entrée, lecture du diagramme de Bode, fréquence de coupure, bande passante, atténuation en dB/décade, ordre du filtre, calcul des amplitudes des harmoniques de sortie.
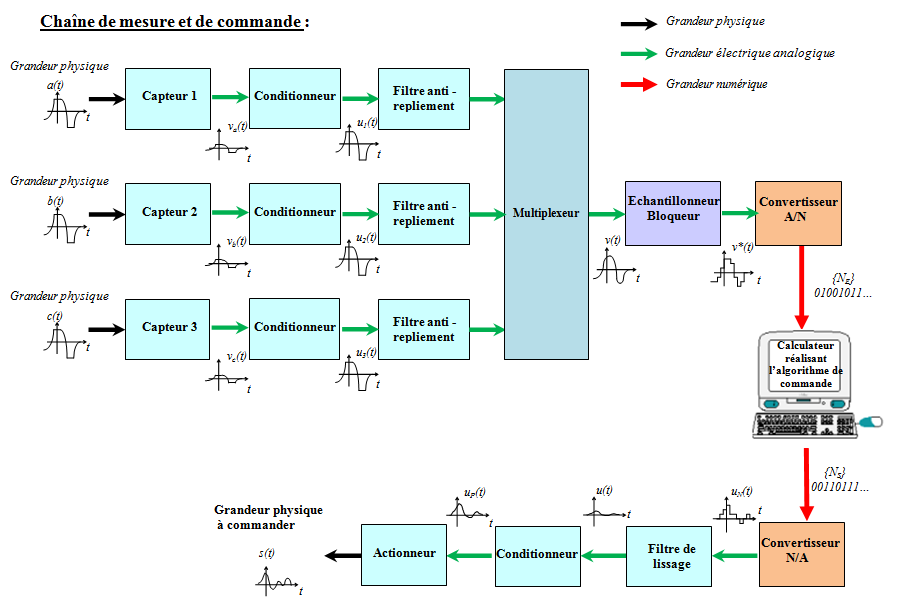
Exercice 5 : Eléments d’une chaîne de traitement numérique : Filtre antirepliement, échantillonneur-bloqueur, CAN, calculateur, CNA, filtre de lissage.
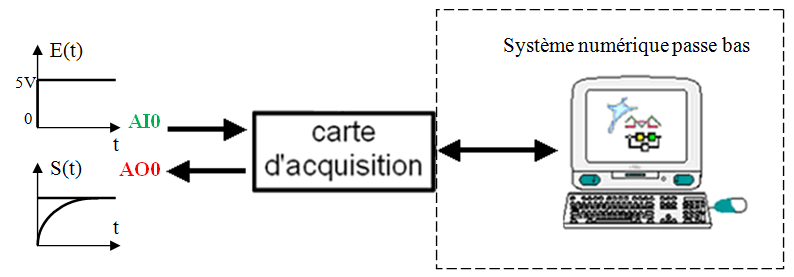
Exercice 6 : Choix d’une carte d’acquisition d’après un cahier des charges : Condition de Shannon, tension pleine échelle, quantum.

Exercice 7 : Filtrage numérique du signal : équation de récurrence, schéma -bloc, filtre récursif ou non récursif, RII ou RIF, stable ou instable, tracé de la réponse impulsionnelle.
Exercice 8 : Extrait BTS :Installation de panneaux photovoltaïques avec dispositif suiveur de soleil (SUN TRACKING)
Partie A : module capteur : quelques éléments sur le dispositif chargé de déterminer l’azimut. Partie B : module capteur : conditionnement analogique. Partie C : module capteur : conversion analogique-numérique et traitement numérique.